Malzemeler
-1 Adet Arduino Uno
-1 Adet Ultrasonik Sensör
-1 Adet LDR
-1 Adet 2*16 LCD
-3 Adet LED
-1 Adet 10k direnç
-3 Adet 330 ohm direnç(330-390 ohm arası olabilir)
-1 Adet Buzzer
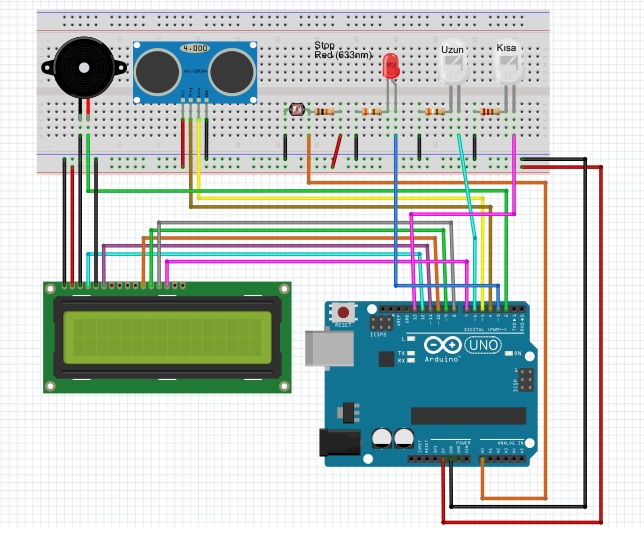
Devre Şeması
#define trigPin 4 // Trigger Pini (Ses gönderme)#define echoPin 5 // Echo Pini (Yansıyan ses algılama)#include <LiquidCrystal.h>LiquidCrystal lcd(7, 8, 9, 10, 11, 12);int ldr = 0; //analog pin to which LDR is connectedint ldr_value = 0; //variable to store LDR valuesint kisa =13;int uzun =6;int stp = 3;int bzr =2;int maksimumMesafe = 200; // Maksimum mesafe. Farketmesi için uzak nesneler daha büyük olmalıdır. int minimumMesafe = 3; // Minimum mesafe long microsaniyeSure, cmMesafe; // Mesafe hesabında kullanılan değişkenlerint ldr_pin=A0;int tonePin = 2;byte possible_patterns[9] = {B00000000, B00000001,B00000011,B00000111,B00001111,B00011111,B00111111, B01111111, B11111111,};void setup() { Serial.begin (9600); // Seri iletişimi başlat pinMode(trigPin, OUTPUT); // Ses gönderme pin türünü çıkış olarak ayarla pinMode(echoPin, INPUT); // Yansıyan ses algılama pin türünü giriş olarak ayarla lcd.begin(16, 2); pinMode(kisa, OUTPUT); pinMode(uzun, OUTPUT); pinMode(stp, OUTPUT); pinMode(bzr, OUTPUT); pinMode(tonePin, OUTPUT);}void loop() {/* Aşağıda trigPin/echoPin döngüsü en yakın nesneden yansıyan sesin yansıma süresini hesaplar. */ int ldr= analogRead(ldr_pin); Serial.println(ldr); digitalWrite(trigPin, LOW); // Hoparlör 2ms sessiz delayMicroseconds(2); digitalWrite(trigPin, HIGH); // Hoparlör 10ms sesli delayMicroseconds(10); digitalWrite(trigPin, LOW); // Hoparlör sessiz microsaniyeSure = pulseIn(echoPin, HIGH); // Mikrofonu dinle, yansıma süresini microsaniyeSure değişkenine al // Serial.println(microsaniyeSure); // Sesin gitme ve geri yansıma süresi cmMesafe = microsaniyeSure/58.3; // microsaniyeSure'dan cm olarak mesafeyi hesapla lcd.clear();if (ldr <= 500) { digitalWrite(kisa ,HIGH); digitalWrite(uzun ,HIGH); lcd.setCursor(0,0); lcd.print("Uzunlar Acik"); } if (ldr >500) { digitalWrite(kisa ,HIGH); digitalWrite(uzun ,LOW); lcd.setCursor(0,0); lcd.print("Uzunlar Kapali "); } if (cmMesafe >= 15 && cmMesafe <20){ digitalWrite(stp ,LOW) ; tone(tonePin,200000, 300); delay(100); } if (cmMesafe >= 10 && cmMesafe <15){ digitalWrite(stp ,LOW); tone(tonePin,200000, 50); delay(300);}if (cmMesafe >=5 && cmMesafe <10 ){ digitalWrite(stp ,LOW); tone(tonePin, 200000,100);}if (cmMesafe <5 ){ digitalWrite(stp ,HIGH); tone(tonePin, 200000);}if (cmMesafe >20 ){ digitalWrite(stp ,LOW); noTone(tonePin); } /* Seri iletişimden ölçülen mesafeyi bilgisayara gönder */ lcd.setCursor(0,2); lcd.print("Mesafe "); lcd.print(cmMesafe); //Mesafe bilgisi lcd.print(" cm"); // Birim değeri delay(1000); //Sonraki ölçümden önce bekleme süresi. }
SA bu kodlar arasındaki tone komutu hata veriyor onun için internette kütüphane araştırdım fakat bulamadım elinizde mevcut ise paylaşma imkanınız var mı?
Teşekkür ederim iyi çalışmalar dilerim.
BeğenLiked by 1 kişi
ya ben projeyi arduinoya ya yeni başladığım zaman bir arşiv olsu diye açtım yani benim de pek bilgim yok çok özür dilerim
BeğenBeğen
Yok malasef 😦
BeğenBeğen